< Coluna em Fórum PCs >

10/03/2008
< Interface tátil II: o flotor >
|
< Coluna em Fórum PCs >
|
|
|
|
10/03/2008
|
< Interface tátil II: o flotor > |
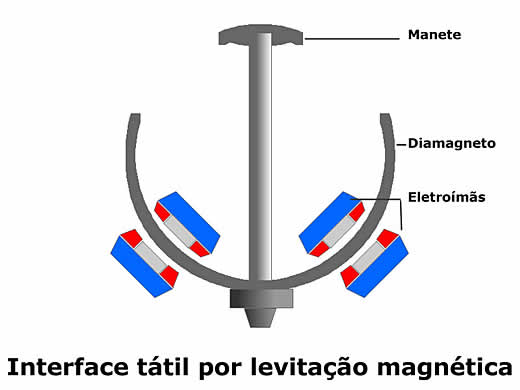
Na coluna anterior discutimos as forças de atração e repulsão magnéticas e os diferentes tipos de magnetismo, incluindo o diamagnetismo. E mostramos como fazer levitar um corpo usando apenas estas forças, um fenômeno conhecido por “levitação magnética”. Hoje vamos ver como os técnicos do Instituto de Robótica da Universidade de Carnegie Mellon, nos EUA, capitaneados pelo pesquisador Ralph Hollis, aplicaram estes conhecimentos para desenvolver uma “interface tátil”. Uma interface tátil é um dispositivo de entrada e saída. De entrada porque transmite ao computador comandos relativos à movimentação tridimensional de um objeto virtual, o seu “cursor” (da mesma forma que o mause, uma interface de entrada, transmite ao computador comandos relativos à movimentação bidimensional na tela do computador de seu cursor, um objeto virtual). E de saída porque transmite ao usuário sensações táteis (relativas ao sentido do tato), como rugosidade das superfícies “tocadas” pelo cursor, peso dos objetos movimentados, viscosidade do meio onde o cursor se move e contato do cursor com os demais objetos exibidos no ambiente artificial mostrado na tela. As tentativas anteriores (quase todas mal sucedidas) de desenvolver interfaces táteis se baseavam em motores elétricos e ligações mecânicas para fornecer as sensações de toque e de reação a forças. Era uma parafernália de peças, eixos e alavancas cujo efeito era bastante limitado. Um exemplo de interface tátil que, embora rudimentar, é bastante comum, são os controladores de jogos (“gamepads”) que contêm um vibrador interno. Quando, por exemplo, o usuário está “pilotando” um veículo virtual em um ambiente de jogo e percorre um trecho de estrada de paralelepípedos, o vibrador é acionado para transmitir a impressão da trepidação do veículo causada pela irregularidade da estrada. Funciona, é verdade. Mas requer um bocado de imaginação para ajudar o sentido do tato... O dispositivo desenvolvido pelo pessoal da Carnegie Mellon está longe da perfeição mas, comparado aos trambolhos que o antecederam, é um primor de simplicidade. A começar pelo fato de dispor de uma única peça móvel que seus inventores denominaram “flotor”, um objeto oco de formato quase esférico constituído de material diamagnético que se prende firmemente uma manete (antes que me venham a acusar de usar palavras de idioma estrangeiro, cito o Houaiss: “manete – regionalismo: Brasil; Rubrica: engenharia mecânica – alavanca usada para acionar manualmente determinadas partes de uma máquina”). É empunhando firmemente e movendo esta manete que o usuário controla a movimentação do cursor na tela (veja diagrama esquemático na Figura 1).
Quando em repouso o flotor permanece levitando entre seis poderosos eletroímãs, mantido imóvel pelo equilíbrio das forças de repulsão que os campos magnéticos dos eletroímãs exercem sobre seu material diamagnético, e tanto sua posição quanto sua orientação são rigorosamente controladas por sensores óticos capazes de perceber o menor deslocamento. Através da manete o usuário pode movimentar o flotor em um espaço tridimensional com seis graus de liberdade: para cima/para baixo; para frente/para trás; para a direita/para a esquerda. Cada movimento provoca duas ações. A primeira é o deslocamento da posição do flotor, acompanhada pelos sensores óticos. A segunda é uma variação do campo magnético de todos os eletroímãs provocada pelo deslocamento do diamagneto. O processamento da primeira ação faz com que o cursor, na tela, execute o movimento na direção e sentido correspondentes ao do flotor. O da segunda controla a rapidez e a força do movimento do cursor de acordo com a intensidade da variação dos diversos campos magnéticos que, por sua vez, é proporcional à força aplicada à manete pelo usuário. Assim, o usuário pode mover o cursor para qualquer ponto do ambiente artificial tridimensional representado na tela. Quando este cursor “toca” um obstáculo, como outro objeto ou uma superfície representada na tela, interage com ele. Dependendo das características atribuídas a estes objetos ou superfícies (como textura, posição e, no caso dos objetos, peso) esta interação fará com que os campos magnéticos aplicados ao flotor variem de acordo, o que aplicará forças correspondentes à manete e fará com que o usuário “sinta” o esforço necessário para provocar o deslocamento dos objetos na tela. Veja, na Figura 2, um desenho do dispositivo de interface tátil montado pela equipe da Carnegie Mellon obtido no sítio da própria Universidade e acompanhe < http://br.youtube.com/watch?v=AXdWqZVTHMQ > aqui um vídeo de demonstração também desenvolvido pela mesma equipe.
As possibilidades do uso de uma interface deste tipo são ilimitadas. Por exemplo: imagine que o cenário exibido na tela mostre um mundo virtual constituído por um cubo de ferro, outro de madeira e uma esfera, todos em repouso sobre uma superfície horizontal de feltro limitada por quatro paredes verticais de madeira. O usuário pode mover o cursor até que ele “toque” um dos três objetos e, a partir deste ponto, forçá-lo contra o objeto para tentar “empurrar” este objeto na direção de uma das paredes. Ao fazer isto ele sentirá a manete reagir como se de fato estivesse empurrando o objeto. A reação será maior ao empurrar o cubo de ferro que ao empurrar o de madeira porque o “peso” do cubo de ferro é maior e por isso maior será o “atrito” entre ele e o piso de feltro. Empurrar a esfera fará com que ela se desloque rapidamente para frente, fazendo com que o usuário sinta apenas por um momento a reação na manete, reação que desaparece quando a esfera começa a “rolar” para adiante. E, em todos os casos, quando um dos objetos ou o próprio cursor tocar uma das paredes laterais, a força de reação será tão grande que a manete não poderá continuar se movendo naquela direção. É claro que para que tudo isto ocorra é preciso antes criar um modelo matemático do ambiente virtual, selecionando os parâmetros que influenciarão o movimento dos objetos e as forças a eles aplicadas (como peso, coeficientes de atrito, etc.) e derivando as equações que governam sua interação. Mas modelagem de ambientes é uma tarefa de programação bem conhecida que pode ser considerada simples diante da dificuldade maior de criar a interface tátil. Ainda usando a manete, além de movimentar o cursor o usuário pode executar três tipos de ações: arremessar, girar e desviar o movimento (“dar guinadas”). Estas ações serão aplicadas aos objetos no ambiente artificial e suas reações serão, por sua vez, processadas e aplicadas à manete através de forças provocadas pelas variações na intensidade dos campos magnéticos dos seis eletroímãs. Note que todas estas forças são geradas pelos campos magnéticos dos eletroímãs e aplicadas à manete conforme o resultado do processamento que leva em conta a natureza, forma e posição dos objetos que compõem o ambiente artificial. Por exemplo: se a superfície horizontal de feltro for “substituída” por outra de madeira polida, os esforços mudarão refletindo a mudança do coeficiente de atrito. De acordo com o artigo < http://www.cmu.edu/news/archive/2008/March/march4_hapticinterface.shtml > “Magnetic Levitation Gives Computer Users Sense of Touch” publicado em 4 de março de 2008 no sítio da Carnegie Mellon, com a nova interface tátil o usuário pode distinguir texturas, sentir a reação de objetos e perceber até mesmo pequenas mudanças em suas posições, já que a interface responde rapidamente às alterações de movimentos. Veja < http://www.cs.cmu.edu/~staszel/stuff/maglev/maglev_haptics_carnegie_mellon_march2008.mov > aqui um vídeo da demonstração prática da interface nos laboratórios da Universidade. O primeiro protótipo da interface tátil foi produzido pelo Instituto de Robótica da Carnegie Mellon em 1997. Desde então ele vem sendo continuamente aperfeiçoado, seu desempenho e aspectos ergonômicos melhorados e seu custo reduzido. No momento, dez dispositivos inteiramente funcionais com o aspecto mostrado na Figura 3 foram montados e distribuídos entre pesquisadores de interfaces táteis de instituições nos EUA e Canadá. Segundo < http://www.vnunet.com/vnunet/news/2211229/mag-lev-gives-computer-users > artigo de Robert Jacques na Vnunet.com, o Prof. Hollis declarou que “pôr o instrumento nas mãos de outros pesquisadores é um fator crítico em um campo novo e ainda em desenvolvimento como a tecnologia tátil”. Por isto a Carnegie Mellon se juntou às Universidades de Harvard, Stanford, Purdue, Cornell e Columbia Britânica (esta última no Canadá) para formar o < http://www.msl.ri.cmu.edu/projects/haptic_consortium/ > Magnetic Levitation Haptic Consortium (em cujo sítio foi obtida a Figura 3), uma instituição internacional dedicada a incentivar e disseminar o uso desta tecnologia.
Interfaces táteis têm um campo de aplicação extremamente amplo que vai desde o entretenimento (já imaginaram usar um treco deste em um jogo?) e engenharia de projeto (para testar protótipos virtuais de mecanismos) até montagem e operação remota de robôs, sem falar em atividades como treinamento médico e dentário (você entregaria sua cárie a um estudante de odontologia em sua primeira aula prática?). E, na medida que aperfeiçoamentos forem desenvolvidos para o dispositivo, certamente se abrirão campos que hoje é impossível antever. O assunto é fascinante. Quem se interessar mais sobre os aspectos práticos da interface pode consultar o excelente artigo < http://blog.wired.com/gadgets/2008/03/hands-on-with-m.html > “Hands-On With Maglev Haptic Control Technology” de Rob Beschizza no Gadget Lab da Wired, fartamente ilustrado e incluindo um interessante vídeo de demonstração. É claro que uma das aplicações mais aguardadas pelos usuários domésticos é o uso da interface para o controle de jogos. Mas melhor não afobar. Em < http://gadgets.boingboing.net/2008/03/05/video-carnegie-mello.html > um post no Boing Boing Gadgets Joel Johnson descreve a experiência de Rob Beschizza e arrisca uma previsão. Diz ele: “baseado neste relato eu prevejo que o Nintendo Wii 2 custará US $ 24.900”. É preciso gostar muito de joguinhos... B. Piropo |